
Frame-based Elastic Models
Résumé
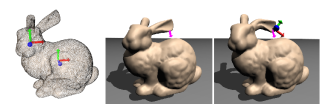
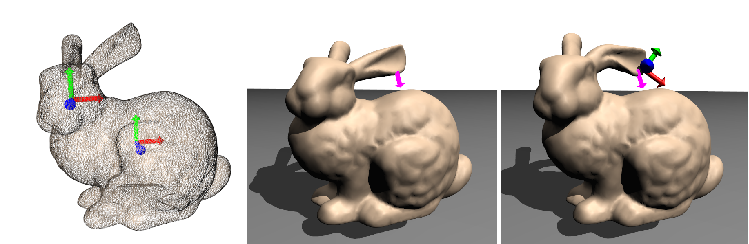
We present a new type of deformable model which combines the realism of physically based continuum mechanics models and the usability of frame- based skinning methods. The degrees of freedom are coordinate frames. In contrast with traditional skinning, frame positions are not scripted but move in reaction to internal body forces. The displacement field is smoothly in- terpolated using dual quaternion blending. The deformation gradient and its derivatives are computed at each sample point of a deformed object and used in the equations of Lagrangian mechanics to achieve physical realism. This allows easy and very intuitive definition of the degrees of freedom of the deformable object. The meshless discretization allows on-the-fly inser- tion of frames to create local deformations where needed. We formulate the dynamics of these models in detail and describe some pre-computations that can be used for speed. We show that our method is effective for behaviors ranging from simple unimodal deformations to complex realistic deforma- tions comparable with Finite Element simulations. To encourage its use, the software will be freely available in the simulation platform SOFA.
Fichier principal
 main.pdf (1.11 Mo)
Télécharger le fichier
main.pdf (1.11 Mo)
Télécharger le fichier
 Teaser.png (159.37 Ko)
Télécharger le fichier
video494.avi (7.72 Mo)
Télécharger le fichier
Teaser.png (159.37 Ko)
Télécharger le fichier
video494.avi (7.72 Mo)
Télécharger le fichier
{kind=link}
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Format | Figure, Image |
|---|
| Format | Vidéo |
|---|
Loading...