
Image-based Collision Detection and Response between Arbitrary Volumetric Objects
Résumé
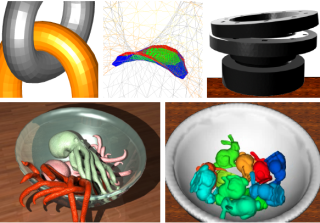
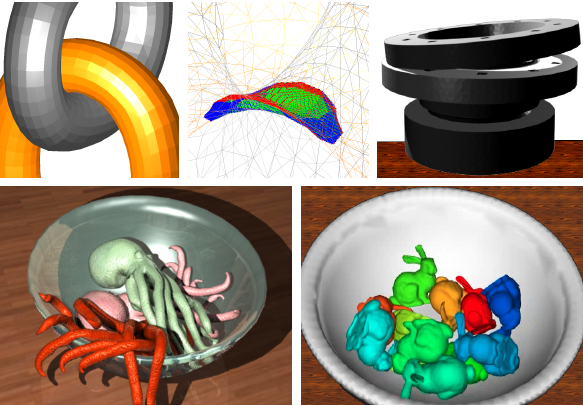
We present a new image-based method to process contacts between objects bounded by triangular surfaces. Unlike previous methods, it relies on image-based volume minimization, which eliminates complex geometrical computations and robustly handles deep intersections. The surfaces are rasterized in three orthogonal directions, and intersections are detected based on pixel depth and normal orientation. Per-pixel contact forces are computed and accumulated at the vertices. We show how to compute pressure forces which serve to minimize the intersection volume, as well as friction forces. No geometrical precomputation is required, which makes the method efficient for both deformable and rigid objects. We demonstrate it on rigid, skinned, and particle-based physical models with detailed surfaces in contacts at interactive frame rates.
Fichier principal
 sofa-ldi-sca2008.pdf (3.09 Mo)
Télécharger le fichier
sofa-ldi-sca2008.pdf (3.09 Mo)
Télécharger le fichier
 ldi08-1.png (284.54 Ko)
Télécharger le fichier
ldi08-1.png (284.54 Ko)
Télécharger le fichier
{kind=link}
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Format | Figure, Image |
|---|
Loading...